PETSc solver component to call out to PETSc for solving the Poisson equation for pressure. More...
Functions/Subroutines | |
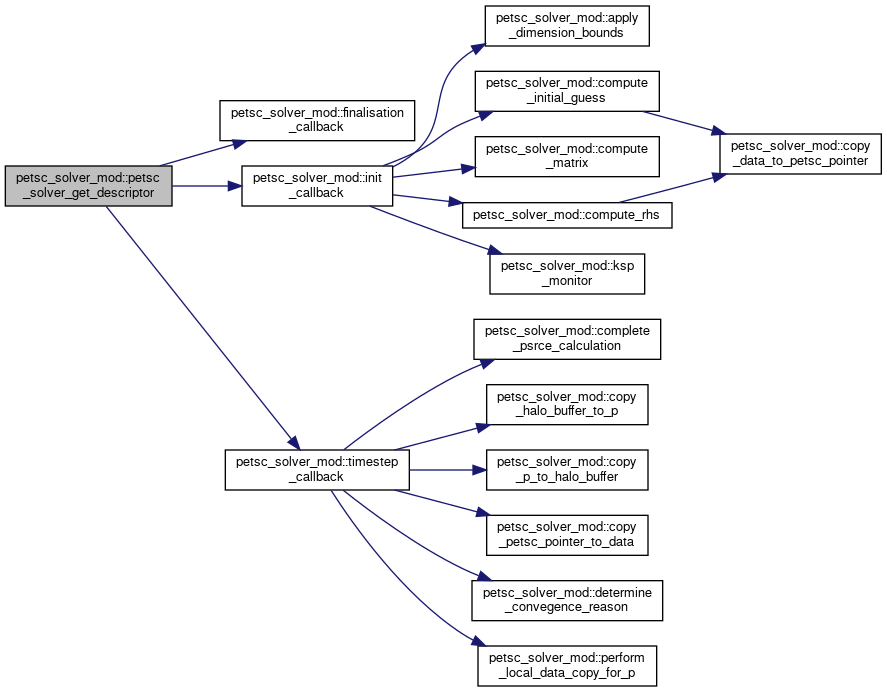
| type(component_descriptor_type) function, public | petsc_solver_get_descriptor () |
| Provides the descriptor back to the caller and is used in component registration. More... | |
| subroutine | finalisation_callback (current_state) |
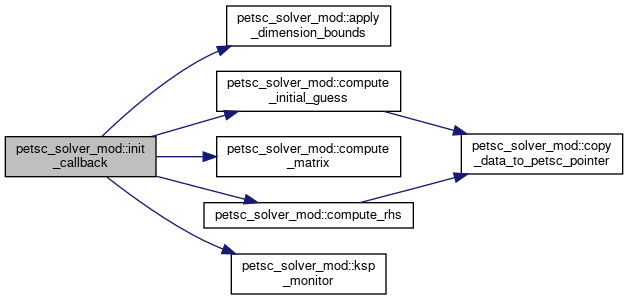
| subroutine | init_callback (current_state) |
| Called upon model initialisation. Will basically read from the options database and set options in the database that are appropriate. More... | |
| subroutine | ksp_monitor (ksp, n, rnorm, dummy, ierr) |
| Monitor procedure called on each iteration, this is provided only at debugging level. More... | |
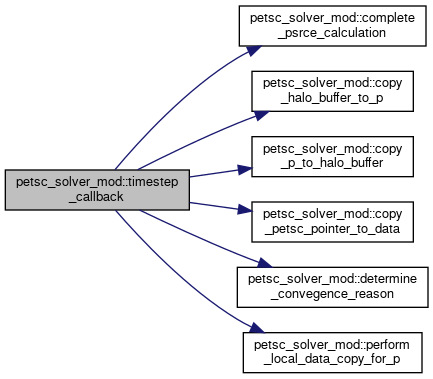
| subroutine | timestep_callback (current_state) |
| Timestep hook which is called at each timestep to solve the pressure equation via PETSc. This will call to set and precondition the matrix on the first call (first timestep) only, and will set the RHS and X initial guess on each call as one would expect. At the end a halo swap is performed on p, which is needed for pstep. More... | |
| character(len=string_length) function | determine_convegence_reason (r_code) |
| subroutine | compute_initial_guess (ksp, x, dummy, ierr) |
| Determines the initial guess, this is called from within PETSc and sets it to be the last value of P or zero if it is the first timestep. More... | |
| subroutine | compute_rhs (ksp, b, dummy, ierr) |
| Callback issued from the PETSc library to compute the RHS, this is called every timestep (as we have a different RHS) More... | |
| subroutine | copy_data_to_petsc_pointer (x, zs, ys, xs, zm, ym, xm, src_values) |
| Copies data into a data pointer which is provided by PETSc, doing it this ways allows us to give a shape to the pointer data and hence the data copy is simpler code wise. More... | |
| subroutine | copy_petsc_pointer_to_data (x, z_start_idx, z_end_idx, y_start_idx, y_end_idx, x_start_idx, x_end_idx, target_values) |
| Copies the data in a pointer that was provided by PETSc into some target data, doing it this way means we can give a shape to the pointer. More... | |
| subroutine | compute_matrix (ksp, A, B, dummy, ierr) |
| Call back issued from within PETSc to create the matrix, this is only called once (the first PETSc run) More... | |
| subroutine | apply_dimension_bounds (dim_size, dim_processes, length_array) |
| Applies dimension bounds to determine the number of elements held locally for each process in that dimension. More... | |
| subroutine | complete_psrce_calculation (current_state, y_halo_size, x_halo_size) |
| Completes the psrce calculation by waiting on all outstanding psrce communications to complete and then combine the received values with the P field for U and V. More... | |
| subroutine | copy_p_to_halo_buffer (current_state, neighbour_description, dim, source_index, pid_location, current_page, source_data) |
| Copies the p field data to halo buffers for a specific process in a dimension and halo cell. More... | |
| subroutine | copy_halo_buffer_to_p (current_state, neighbour_description, dim, target_index, neighbour_location, current_page, source_data) |
| subroutine | perform_local_data_copy_for_p (current_state, halo_depth, involve_corners, source_data) |
| Does local data copying for P variable halo swap. More... | |
Variables | |
| integer | z_start |
| integer | z_end |
| integer | y_start |
| integer | y_end |
| integer | x_start |
| integer | x_end |
| type(halo_communication_type), save | halo_swap_state |
| real(kind=default_precision), dimension(:,:,:), allocatable | p_source |
| real(kind=default_precision), dimension(:,:,:), allocatable | prev_p |
| real(kind=default_precision) | cx |
| real(kind=default_precision) | cy |
| real(kind=default_precision), dimension(:), allocatable | rdzn |
| real(kind=default_precision), dimension(:), allocatable | rdz |
| real(kind=default_precision), dimension(:), allocatable | rho |
| real(kind=default_precision), dimension(:), allocatable | rhon |
| real(kind=default_precision), dimension(:), allocatable | dz |
| real(kind=default_precision), dimension(:), allocatable | dzn |
Detailed Description
PETSc solver component to call out to PETSc for solving the Poisson equation for pressure.
Dummy stub when not compiling with PETSc iterative solver.
Function/Subroutine Documentation
◆ apply_dimension_bounds()
|
private |
Applies dimension bounds to determine the number of elements held locally for each process in that dimension.
- Parameters
-
dim_size The global size of the dimension dim_processes The number of processes in that dimension length_array Output array of size dim_processes which contains the number of elements held locally for each process
Definition at line 418 of file petsc_solver.F90.

◆ complete_psrce_calculation()
|
private |
Completes the psrce calculation by waiting on all outstanding psrce communications to complete and then combine the received values with the P field for U and V.
- Parameters
-
current_state The current model state y_halo_size The halo size in the Y dimension x_halo_size The halo size in the X dimension
Definition at line 440 of file petsc_solver.F90.

◆ compute_initial_guess()
|
private |
Determines the initial guess, this is called from within PETSc and sets it to be the last value of P or zero if it is the first timestep.
- Parameters
-
ksp The PETSc KSP data structure which contains the context of the solver X The X vector to create an initial guess for dummy Dummy argument to maintain consistency with the PETSc C interface ierr PETSc error code
Definition at line 234 of file petsc_solver.F90.


◆ compute_matrix()
|
private |
Call back issued from within PETSc to create the matrix, this is only called once (the first PETSc run)
- Parameters
-
ksp The solver data structure which provides context for this run A Matrix A this is the linear operator B Matrix B this is the preconditioning matrix dummy Dummy argument to ensure consistency with C PETSc interface ierr The PETSc error code
Definition at line 323 of file petsc_solver.F90.

◆ compute_rhs()
|
private |
Callback issued from the PETSc library to compute the RHS, this is called every timestep (as we have a different RHS)
- Parameters
-
ksp The KSP data structure which contains the solver context b The RHS dummy Dummy argument for compatability with the C PETSc interface ierr Error code
Definition at line 256 of file petsc_solver.F90.


◆ copy_data_to_petsc_pointer()
|
private |
Copies data into a data pointer which is provided by PETSc, doing it this ways allows us to give a shape to the pointer data and hence the data copy is simpler code wise.
- Parameters
-
x The target pointer to copy into zs Local starting point in Z ys Local starting point in Y xs Local starting point in X zm Number of points held locally in Z ym Number of points held locally in Y xm Number of points held locally in X src_values The data values to copy from into this target data array
Definition at line 283 of file petsc_solver.F90.

◆ copy_halo_buffer_to_p()
|
private |
Definition at line 504 of file petsc_solver.F90.

◆ copy_p_to_halo_buffer()
|
private |
Copies the p field data to halo buffers for a specific process in a dimension and halo cell.
- Parameters
-
current_state The current model state neighbour_descriptions Description of the neighbour halo swapping status dim Dimension to copy from source_index The source index of the dimension we are reading from in the prognostic field pid_location Location of the neighbouring process in the local stored data structures current_page The current (next) buffer page to copy into source_data Optional source data which is read from
Definition at line 485 of file petsc_solver.F90.

◆ copy_petsc_pointer_to_data()
|
private |
Copies the data in a pointer that was provided by PETSc into some target data, doing it this way means we can give a shape to the pointer.
- Parameters
-
x The pointer provided by PETSc that we copy from z_start Starting point for the target array in Z z_end Ending point for the target array in Z y_start Starting point for the target array in Y y_end Ending point for the target array in Y x_start Starting point for the target array in X x_end Ending point for the target array in X target_values Target array to copy into
Definition at line 309 of file petsc_solver.F90.

◆ determine_convegence_reason()
|
private |
Definition at line 208 of file petsc_solver.F90.

◆ finalisation_callback()
|
private |

◆ init_callback()
|
private |
Called upon model initialisation. Will basically read from the options database and set options in the database that are appropriate.
- Parameters
-
current_state The current model state_mod
Definition at line 62 of file petsc_solver.F90.

◆ ksp_monitor()
|
private |
Monitor procedure called on each iteration, this is provided only at debugging level.
- Parameters
-
ksp The PETSc KSP data structure which contains the context of the solver n The iteration rnorm The relative norm dummy Dummy argument to maintain consistency with the PETSc C interface ierr PETSc error code
Definition at line 160 of file petsc_solver.F90.

◆ perform_local_data_copy_for_p()
|
private |
Does local data copying for P variable halo swap.
- Parameters
-
current_state The current model state_mod source_data Optional source data which is written into
Definition at line 521 of file petsc_solver.F90.

◆ petsc_solver_get_descriptor()
| type(component_descriptor_type) function, public petsc_solver_mod::petsc_solver_get_descriptor |
Provides the descriptor back to the caller and is used in component registration.
- Returns
- The PETSc solvre component descriptor
- The termination check component descriptor
Definition at line 43 of file petsc_solver.F90.
◆ timestep_callback()
|
private |
Timestep hook which is called at each timestep to solve the pressure equation via PETSc. This will call to set and precondition the matrix on the first call (first timestep) only, and will set the RHS and X initial guess on each call as one would expect. At the end a halo swap is performed on p, which is needed for pstep.
- Parameters
-
current_state The current model state_mod
Definition at line 174 of file petsc_solver.F90.

Variable Documentation
◆ cx
|
private |
Definition at line 34 of file petsc_solver.F90.
◆ cy
|
private |
Definition at line 34 of file petsc_solver.F90.
◆ dz
|
private |
Definition at line 35 of file petsc_solver.F90.
◆ dzn
|
private |
Definition at line 35 of file petsc_solver.F90.
◆ halo_swap_state
|
private |
Definition at line 31 of file petsc_solver.F90.
◆ p_source
|
private |
Definition at line 33 of file petsc_solver.F90.
◆ prev_p
|
private |
Definition at line 33 of file petsc_solver.F90.
◆ rdz
|
private |
Definition at line 35 of file petsc_solver.F90.
◆ rdzn
|
private |
Definition at line 35 of file petsc_solver.F90.
◆ rho
|
private |
Definition at line 35 of file petsc_solver.F90.
◆ rhon
|
private |
Definition at line 35 of file petsc_solver.F90.
◆ x_end
|
private |
Definition at line 30 of file petsc_solver.F90.
◆ x_start
|
private |
Definition at line 30 of file petsc_solver.F90.
◆ y_end
|
private |
Definition at line 30 of file petsc_solver.F90.
◆ y_start
|
private |
Definition at line 30 of file petsc_solver.F90.
◆ z_end
|
private |
Definition at line 30 of file petsc_solver.F90.
◆ z_start
|
private |
Definition at line 30 of file petsc_solver.F90.