This is the iterative pressure solver and uses a Jacobi preconditioned BiCGStab which we implement here. More...
Data Types | |
| type | matrix_type |
| A helper type to abstract the concrete details of the matrix. More... | |
Functions/Subroutines | |
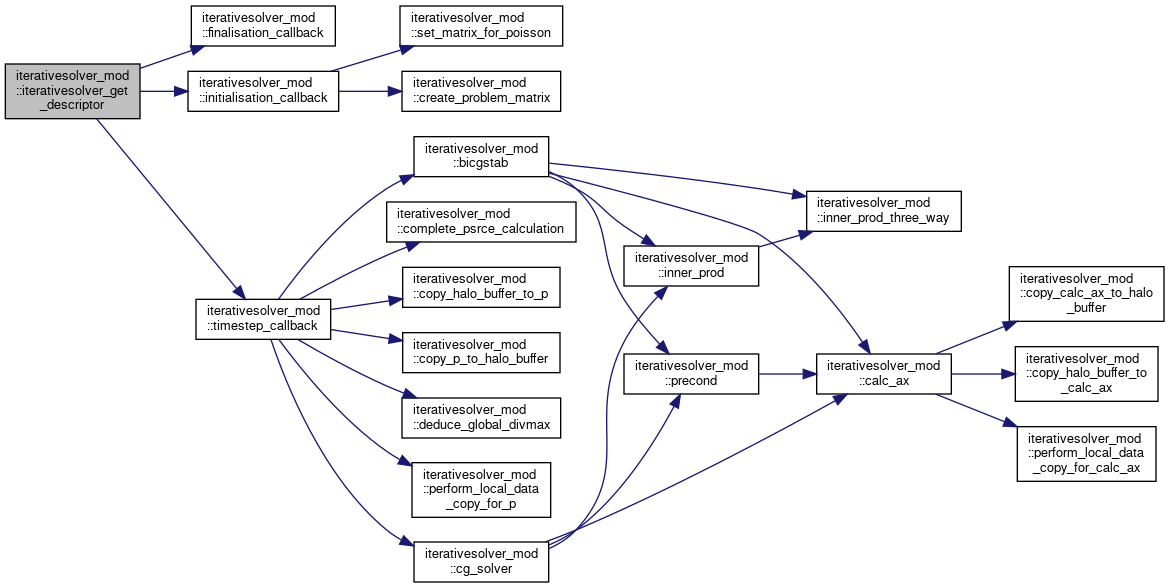
| type(component_descriptor_type) function, public | iterativesolver_get_descriptor () |
| Descriptor of the iterative solver component used by the registry. More... | |
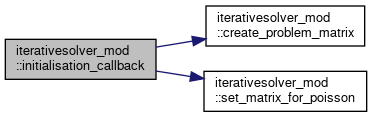
| subroutine | initialisation_callback (current_state) |
| Initialisation callback hook which will set up the halo swapping state and allocate some data. More... | |
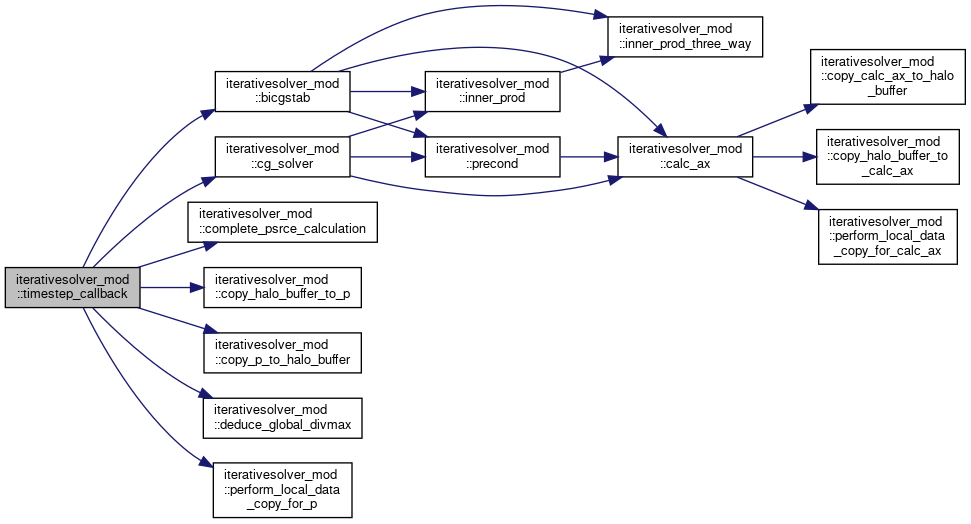
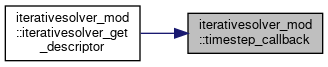
| subroutine | timestep_callback (current_state) |
| Timestep callback, this ignores all but the last column where it calls the solver. More... | |
| subroutine | finalisation_callback (current_state) |
| Called as MONC is shutting down and frees the halo swap state and deallocates local data. More... | |
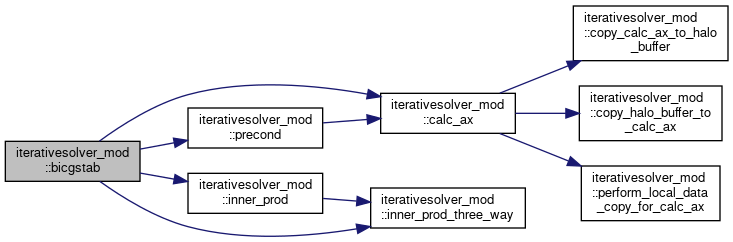
| subroutine | bicgstab (current_state, A, x, b, i_strt, i_end, j_strt, j_end, k_end) |
| Performs the BiCGStab KS method. More... | |
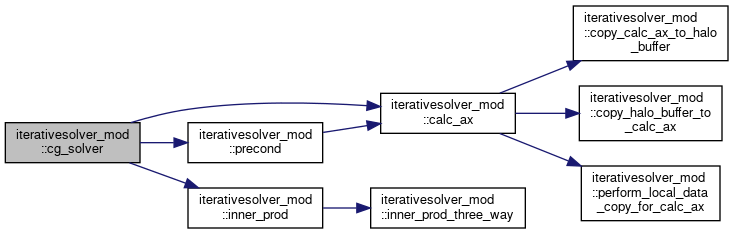
| subroutine | cg_solver (current_state, A, x, b, i_strt, i_end, j_strt, j_end, k_end) |
| Performs the preconditioned conjugate gradient method. More... | |
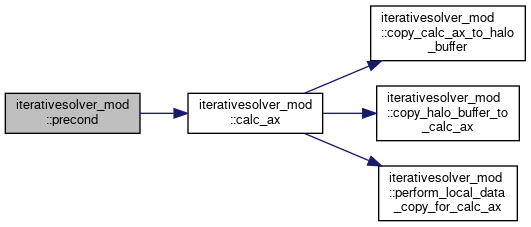
| subroutine | precond (current_state, A, s, r, preits) |
| Jacobi preconditioner. More... | |
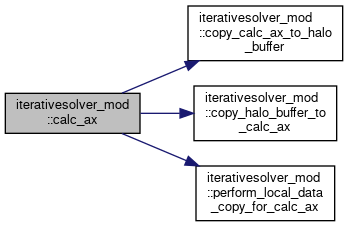
| subroutine | calc_ax (current_state, A, x, Ax) |
| Calculates A * x. More... | |
| real(kind=default_precision) function | inner_prod (current_state, x, y, i_strt, i_end, j_strt, j_end, k_end) |
| Returns the global inner product of two vectors, ignoring the halo cells. More... | |
| real(kind=default_precision) function, dimension(3) | inner_prod_three_way (current_state, t, s, i_strt, i_end, j_strt, j_end, k_end) |
| Returns the global inner product of a pair of vectors, ignoring the halo cells for three separate pairs. This call is for optimisation to bunch up the comms in a BiCGStab solver per iteration. More... | |
| subroutine | set_matrix_for_poisson (grid_configuration, A, z_size) |
| Sets the values of the provided matrix to solve the poisson equation. More... | |
| subroutine | deduce_global_divmax (current_state) |
| Determines the global divmax which is written into the current state. More... | |
| subroutine | copy_p_to_halo_buffer (current_state, neighbour_description, dim, source_index, pid_location, current_page, source_data) |
| Copies the p field data to halo buffers for a specific process in a dimension and halo cell. More... | |
| subroutine | copy_calc_ax_to_halo_buffer (current_state, neighbour_description, dim, source_index, pid_location, current_page, source_data) |
| Copies the source field data to halo buffers for a specific process in a dimension and halo cell - for the calc_Ax halo swaps. More... | |
| subroutine | copy_halo_buffer_to_p (current_state, neighbour_description, dim, target_index, neighbour_location, current_page, source_data) |
| Copies the halo buffer to halo location for the p field. More... | |
| subroutine | copy_halo_buffer_to_calc_ax (current_state, neighbour_description, dim, target_index, neighbour_location, current_page, source_data) |
| Copies the halo buffer to halo location for the source field as required in the calc_Ax procedure. More... | |
| subroutine | perform_local_data_copy_for_p (current_state, halo_depth, involve_corners, source_data) |
| Does local data copying for P variable halo swap. More... | |
| subroutine | perform_local_data_copy_for_calc_ax (current_state, halo_depth, involve_corners, source_data) |
| Does a local data copy for halo swapping cells with wrap around (to maintain periodic boundary condition) More... | |
| type(matrix_type) function | create_problem_matrix (z_size) |
| Creates a problem matrix, allocating the required data based upon the column size. More... | |
| subroutine | complete_psrce_calculation (current_state, y_halo_size, x_halo_size) |
| Completes the psrce calculation by waiting on all outstanding psrce communications to complete and then combine the received values with the P field for U and V. More... | |
Variables | |
| real(kind=default_precision) | tolerance |
| real(kind=default_precision) | relaxation |
| Solving tollerance. More... | |
| integer | max_iterations |
| Maximum number of BiCGStab iterations. More... | |
| integer | preconditioner_iterations |
| Number of preconditioner iterations to perform per call. More... | |
| logical | symm_prob |
| real(kind=default_precision), parameter | tiny = 1.0e-16 |
| Minimum residual - if we go below this then something has gone wrong. More... | |
| type(halo_communication_type), save | halo_swap_state |
| The halo swap state as initialised by that module. More... | |
| real(kind=default_precision), dimension(:,:,:), allocatable | psource |
| real(kind=default_precision), dimension(:,:,:), allocatable | prev_p |
| Passed to BiCGStab as the RHS. More... | |
| logical | first_run =.true. |
| type(matrix_type) | a |
Detailed Description
This is the iterative pressure solver and uses a Jacobi preconditioned BiCGStab which we implement here.
Function/Subroutine Documentation
◆ bicgstab()
|
private |
Performs the BiCGStab KS method.
- Parameters
-
current_state The current model state A The matrix x The solution b The RHS
Definition at line 135 of file iterativesolver.F90.

◆ calc_ax()
|
private |
Calculates A * x.
- Parameters
-
current_state The current model state A The matrix x Vector to multiply with Ax Result of A*x
Definition at line 378 of file iterativesolver.F90.

◆ cg_solver()
|
private |
Performs the preconditioned conjugate gradient method.
- Parameters
-
current_state The current model state A The matrix x The solution b The RHS
Definition at line 248 of file iterativesolver.F90.

◆ complete_psrce_calculation()
|
private |
Completes the psrce calculation by waiting on all outstanding psrce communications to complete and then combine the received values with the P field for U and V.
- Parameters
-
current_state The current model state y_halo_size The halo size in the Y dimension x_halo_size The halo size in the X dimension
Definition at line 735 of file iterativesolver.F90.

◆ copy_calc_ax_to_halo_buffer()
|
private |
Copies the source field data to halo buffers for a specific process in a dimension and halo cell - for the calc_Ax halo swaps.
- Parameters
-
current_state The current model state neighbour_descriptions Description of the neighbour halo swapping status dim Dimension to copy from source_index The source index of the dimension we are reading from in the prognostic field pid_location Location of the neighbouring process in the local stored data structures current_page The current (next) buffer page to copy into source_data Optional source data which is read from
Definition at line 623 of file iterativesolver.F90.

◆ copy_halo_buffer_to_calc_ax()
|
private |
Copies the halo buffer to halo location for the source field as required in the calc_Ax procedure.
- Parameters
-
current_state The current model state neighbour_description The halo swapping description of the neighbour we are accessing the buffer of dim The dimension we receive for target_index The target index for the dimension we are receiving for neighbour_location The location in the local neighbour data stores of this neighbour current_page The current, next, halo swap page to read from (all previous have been read and copied already) source_data Optional source data which is written into
Definition at line 671 of file iterativesolver.F90.

◆ copy_halo_buffer_to_p()
|
private |
Copies the halo buffer to halo location for the p field.
- Parameters
-
current_state The current model state neighbour_description The halo swapping description of the neighbour we are accessing the buffer of dim The dimension we receive for target_index The target index for the dimension we are receiving for neighbour_location The location in the local neighbour data stores of this neighbour current_page The current, next, halo swap page to read from (all previous have been read and copied already) source_data Optional source data which is written into
Definition at line 649 of file iterativesolver.F90.

◆ copy_p_to_halo_buffer()
|
private |
Copies the p field data to halo buffers for a specific process in a dimension and halo cell.
- Parameters
-
current_state The current model state neighbour_descriptions Description of the neighbour halo swapping status dim Dimension to copy from source_index The source index of the dimension we are reading from in the prognostic field pid_location Location of the neighbouring process in the local stored data structures current_page The current (next) buffer page to copy into source_data Optional source data which is read from
Definition at line 601 of file iterativesolver.F90.

◆ create_problem_matrix()
|
private |
Creates a problem matrix, allocating the required data based upon the column size.
- Parameters
-
z_size Number of elements in the vertical column
- Returns
- The allocated matrix ready to be used
Definition at line 722 of file iterativesolver.F90.

◆ deduce_global_divmax()
|
private |
Determines the global divmax which is written into the current state.
- Parameters
-
current_state The current model state
Definition at line 584 of file iterativesolver.F90.

◆ finalisation_callback()
|
private |
Called as MONC is shutting down and frees the halo swap state and deallocates local data.
- Parameters
-
current_state The current model state
Definition at line 123 of file iterativesolver.F90.

◆ initialisation_callback()
|
private |
Initialisation callback hook which will set up the halo swapping state and allocate some data.
- Parameters
-
current_state The current model state
Definition at line 57 of file iterativesolver.F90.

◆ inner_prod()
|
private |
Returns the global inner product of two vectors, ignoring the halo cells.
- Parameters
-
current_state The current model state x First vector @praam y Second vector
- Returns
- Global inner product of the two input vectors
Definition at line 478 of file iterativesolver.F90.


◆ inner_prod_three_way()
|
private |
Returns the global inner product of a pair of vectors, ignoring the halo cells for three separate pairs. This call is for optimisation to bunch up the comms in a BiCGStab solver per iteration.
- Parameters
-
current_state The current model state x First vector @praam y Second vector
- Returns
- Global inner product of the two input vectors
Definition at line 506 of file iterativesolver.F90.

◆ iterativesolver_get_descriptor()
| type(component_descriptor_type) function, public iterativesolver_mod::iterativesolver_get_descriptor |
Descriptor of the iterative solver component used by the registry.
- Returns
- The iterative solver component descriptor
Definition at line 47 of file iterativesolver.F90.
◆ perform_local_data_copy_for_calc_ax()
|
private |
Does a local data copy for halo swapping cells with wrap around (to maintain periodic boundary condition)
- Parameters
-
current_state The current model state source_data Optional source data which is written into
Definition at line 705 of file iterativesolver.F90.

◆ perform_local_data_copy_for_p()
|
private |
Does local data copying for P variable halo swap.
- Parameters
-
current_state The current model state_mod source_data Optional source data which is written into
Definition at line 692 of file iterativesolver.F90.

◆ precond()
|
private |
Jacobi preconditioner.
- Parameters
-
current_state The current model state A The matrix s Written into as result of preconditioning r Input values to preconditioner preits Number of iterations of the preconditioner to perform per call
Definition at line 320 of file iterativesolver.F90.

◆ set_matrix_for_poisson()
|
private |
Sets the values of the provided matrix to solve the poisson equation.
- Parameters
-
grid_configuration Configuration of the vertical and horizontal grids A The matrix that the values are written into z_size Number of elements in a column
Definition at line 537 of file iterativesolver.F90.

◆ timestep_callback()
|
private |
Timestep callback, this ignores all but the last column where it calls the solver.
- Parameters
-
current_state The current model state
Definition at line 84 of file iterativesolver.F90.
Variable Documentation
◆ a
|
private |
Definition at line 40 of file iterativesolver.F90.
◆ first_run
|
private |
Definition at line 39 of file iterativesolver.F90.
◆ halo_swap_state
|
private |
The halo swap state as initialised by that module.
Definition at line 37 of file iterativesolver.F90.
◆ max_iterations
|
private |
Maximum number of BiCGStab iterations.
Definition at line 31 of file iterativesolver.F90.
◆ preconditioner_iterations
|
private |
Number of preconditioner iterations to perform per call.
Definition at line 31 of file iterativesolver.F90.
◆ prev_p
|
private |
Passed to BiCGStab as the RHS.
Definition at line 38 of file iterativesolver.F90.
◆ psource
|
private |
Definition at line 38 of file iterativesolver.F90.
◆ relaxation
|
private |
Solving tollerance.
Definition at line 30 of file iterativesolver.F90.
◆ symm_prob
|
private |
Definition at line 33 of file iterativesolver.F90.
◆ tiny
|
private |
Minimum residual - if we go below this then something has gone wrong.
Definition at line 35 of file iterativesolver.F90.
◆ tolerance
|
private |
Definition at line 30 of file iterativesolver.F90.